The polar plot of the system shown below
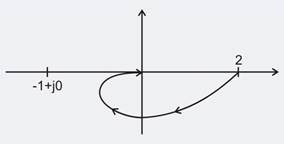
determine order of the system
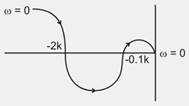
The polar plot of a system is given below, the range of k for stability of the system is
OLTF of an unity feedback system is. The value of ‘K’ for the poles to lies left side of s = –4 is
The current shape of the polar plat for is
For given Nyquist plot:
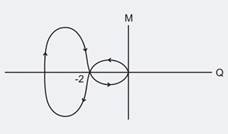
The system is _____ if no of open loop pole is 1
For a second order system which of the following statements are true
I) Resonant frequency is indicative of steady state
II) Resonant peak is indicative of relative stability
III) Resonant frequency is indicative of setting time.
A unity feedback control system has
The order and type of the closed-loop system will be
Consider the following statements regarding Routh-Hurwitz criterion for stability:
1. Routh-Hurwitz criterion is a necessary and sufficient condition for stability.
2. The relative stability is dictated by the location of the roots of the characteristic equation.
3. A stable system is dynamic system with a bounded response to a bounded input.
Which of the statements given above are correct?
The gain margin for the system with open-loop transfer function G(s) H(s) = , is (in dB)
The Frequency that corresponds to maximum phase angle of the system
Match List – I with List – II and select the correct answer using the code given below the lists:
|
|
List – I |
|
List – II |
|
A. |
|
1. |
|
|
B. |
|
2. |
|
|
C. |
|
3. |
|
|
D. |
|
4. |
|
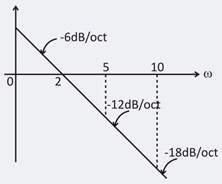
Find the Nyquist plot for the bode plate given below:
A feedback control system has an open loop transfer function G(s) H(s) = . The max value of k for closed loop its stability is
Poles of a closed loop transfer function are important because
Introduction of integral action in the forward path of a unity feedback system will result in








